DRL Model for Autonomous Vehicles
Applied Deep Reinforcement Learning using PPO to train an autonomous vehicle agent for safe and efficient navigation in a simulated driving environment.

DRL Model for AV Research Details
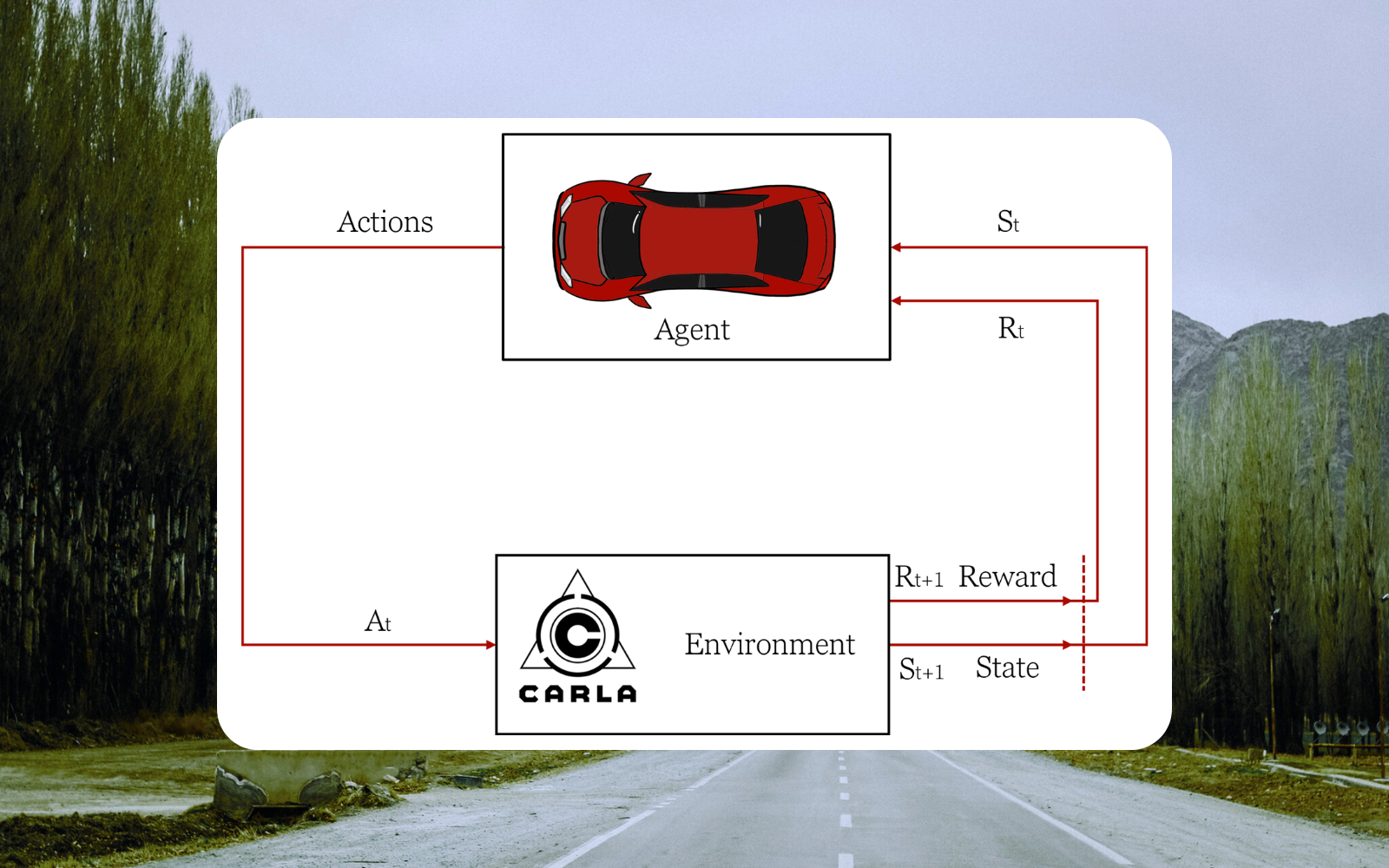
This project explores the application of Deep Reinforcement Learning (DRL) to autonomous vehicle navigation with the goal of enabling safer and more efficient transportation systems. Reinforcement Learning models learn through reward-based feedback, gradually improving decision-making as they interact with an environment. DRL was chosen for this project to allow the agent to adapt dynamically to complex driving scenarios over time. By simulating real-world conditions, the project demonstrates how intelligent agents can learn optimal driving behavior without explicit programming.
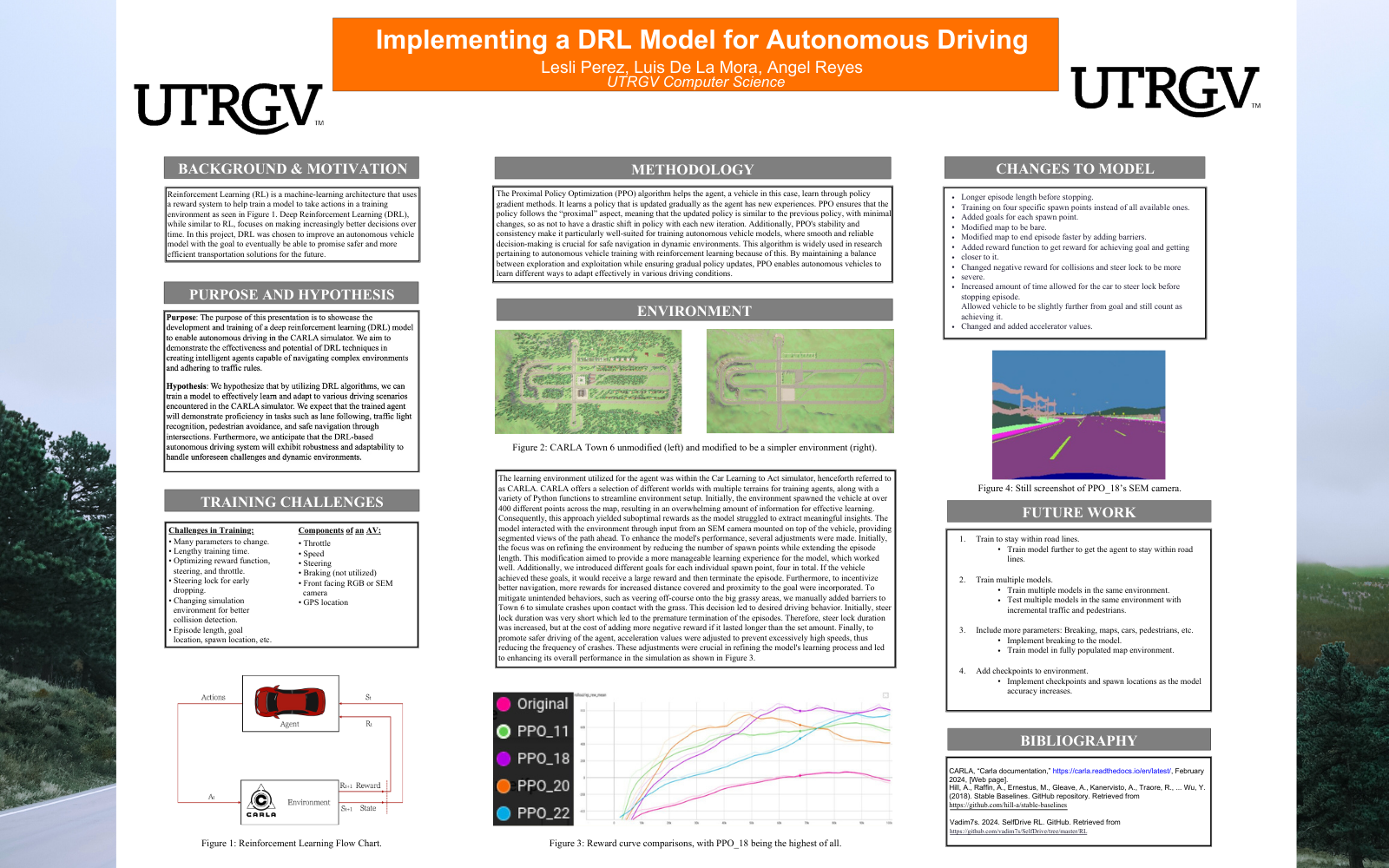
The model was trained using the Proximal Policy Optimization (PPO) algorithm within the CARLA autonomous driving simulator. PPO was selected due to its stability and ability to make gradual policy updates, which is essential for smooth and reliable vehicle control. The agent received visual input from a semantic segmentation camera mounted on the vehicle and was trained across multiple spawn points and terrains. Extensive environment and reward-function tuning, including goal-based rewards, collision penalties, and speed constraints, were implemented to encourage safer navigation and better driving behavior.
By maintaining a balance between exploration and exploitation while ensuring gradual policy updates, PPO enables autonomous vehicles to learn different ways to adapt effectively in various driving conditions.
Through iterative refinement of the environment, reward structure, and vehicle controls, the model demonstrated improved learning stability and driving performance within the simulation. These changes reduced erratic behavior and increased the agent’s ability to reach navigation goals safely. Overall, the project highlights the potential of reinforcement learning as a foundation for future autonomous vehicle research and development.
Project information
- Category Research
- Technologies Python, CARLA Autonomous Driving Simulator, Proximal Policy Optimization (PPO), Deep Reinforcement Learning (DRL), OpenAI Gym–style environments, Computer vision (semantic segmentation input)
- Skills Reinforcement learning algorithm analysis, Deep reinforcement learning model training, Simulation-based environment engineering, Autonomous systems research, Technical research presentation
- Project date February 2024 - May 2024
- Final Presentation Final Presentation Download